基于ARM的灭火机器设计
计算机时代2014年第1
基于ARM的灭火机器设计
共1页
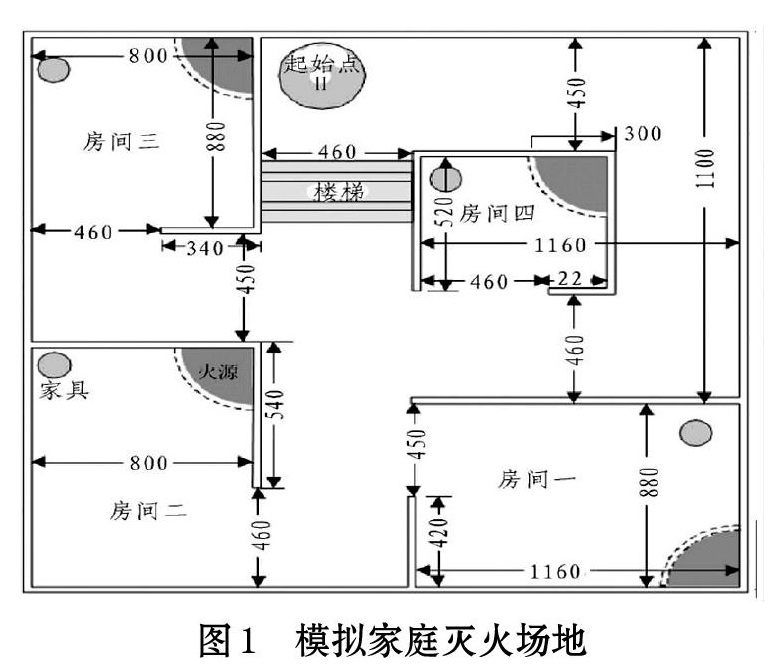
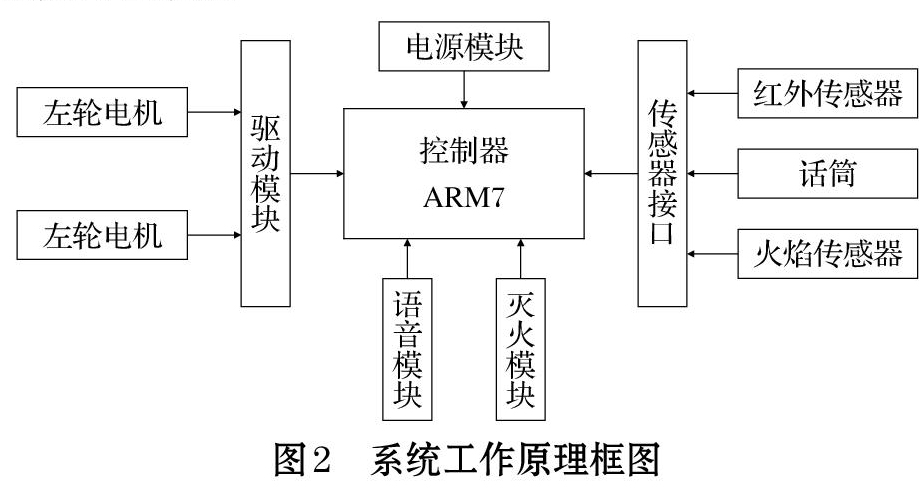
摘 要: 以室内环境为研究对象,设计了一个自主行走的灭火机器人。系统以ARM单片机为核心控制单元,结合避障传感器、红外传感器和灰度传感器等实现了机器人自主行走并灭火。根据环境参数要求,对机器人的设计方案进行了合理的选择和分析,实现了机器人稳定、快速、精确消灭火源。通过实例验证,设计方案稳定可靠,机器人可在10秒内完成寻找火源并灭火。关键词: PWM电路; 测障传感器; 火焰传感器; 直流电机中图分类号:TP312 文献标志码:A 文章编号:1006-8228(2014)01-11-030 引言目前很多高等院校和研究院所从事各类机器人的研究工作,已经在机器人的感觉识别、操作、移动技术、人机接口技术、智能化技术等方面取得了可喜的成就。这些成就为灭火机器人的研制创造了良好的环境条件。本文针对灭火机器人的硬件条件和灭火比赛的具体功能要求,进行了智能灭火机器人精确控
下一页>>
广州市越秀区图书馆版权所有。
联系电话:020-87673002
本站访问人数: