基于ARM的灭火机器设计
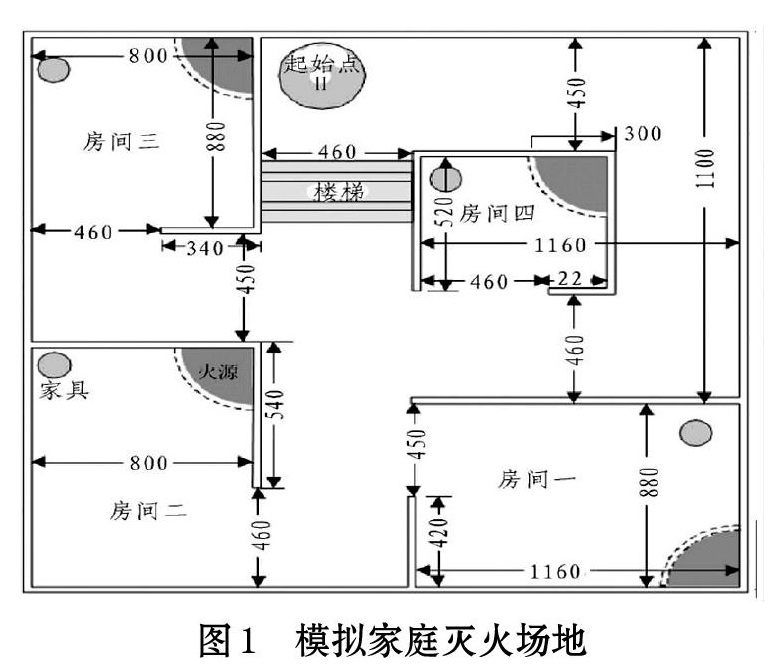
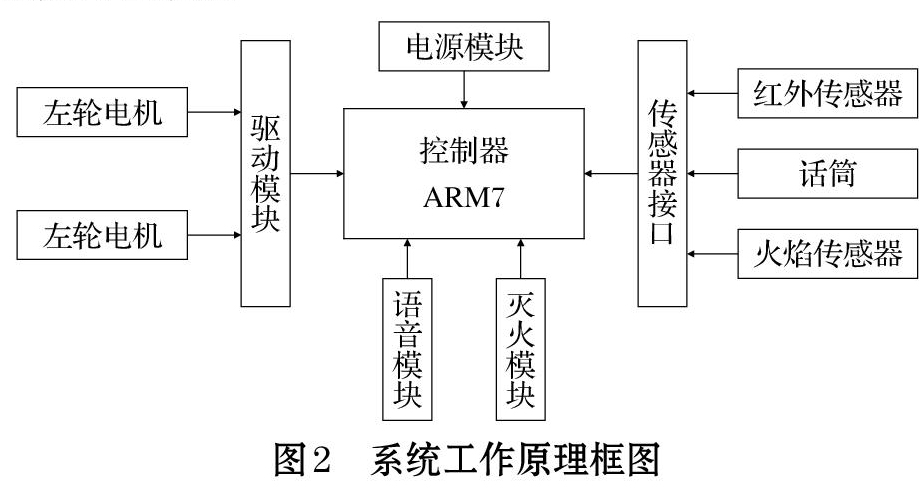
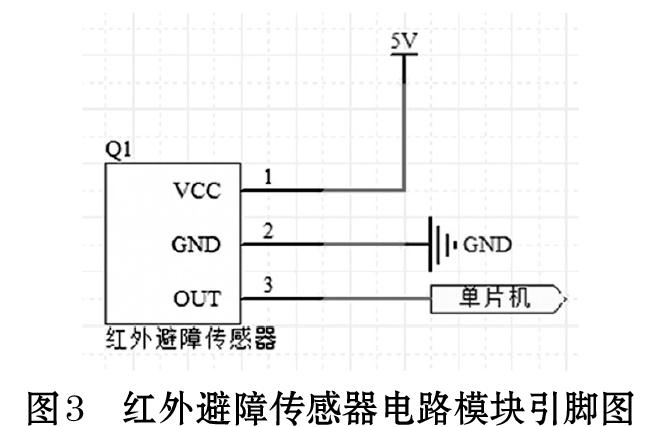
制研究,实现机器人快速稳定地灭火。1 研究任务本研究是针对家庭环境下的灭火机器人,让机器人在室内环境内自主完成火源的查找并消灭火源,以火源查找与灭火的精确性和快速性为设计要求。以蜡烛模拟火源,随机分布在场地中,模拟灭火场地如图1所示。2 系统工作原理及功能简介本系统采用32位ARM内核单片机作为主机控制模块。采用红外避障传感器来识别墙壁和障碍物,用火焰传感器来检测火源。单片机对传感器识别到的信号加以分析和判断,通过对直流电机的控制实现小车前进和灭火的任务。系统工作原理框图如图2所示。3 硬件设计3.1 红外避障电路红外避障传感器是一种集发射与接收于一体的光电传感器,根据高频调制的红外线在待测距离上往返产生的相位移推算出光束度越时间Δt,从而根据DCΔt/2计算出里待测物体的距离。这里选择纳英特公司的红外避障传感器,数字量输出,不需要进行AD转换,可直接连接单片机的IO口。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于
<<上一页 下一页>>
广州市越秀区图书馆版权所有。
联系电话:020-87673002
本站访问人数: