基于ARM的灭火机器设计
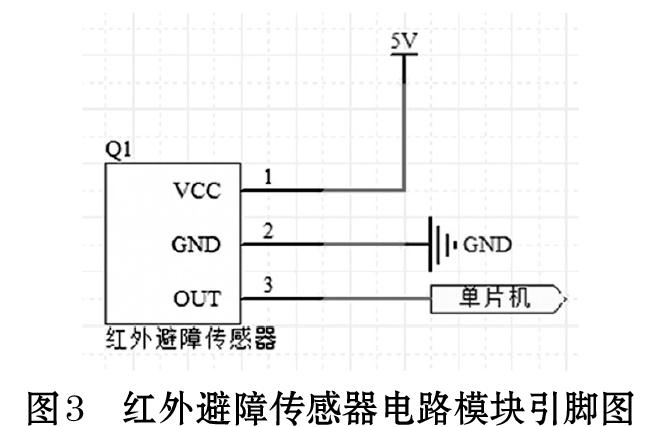
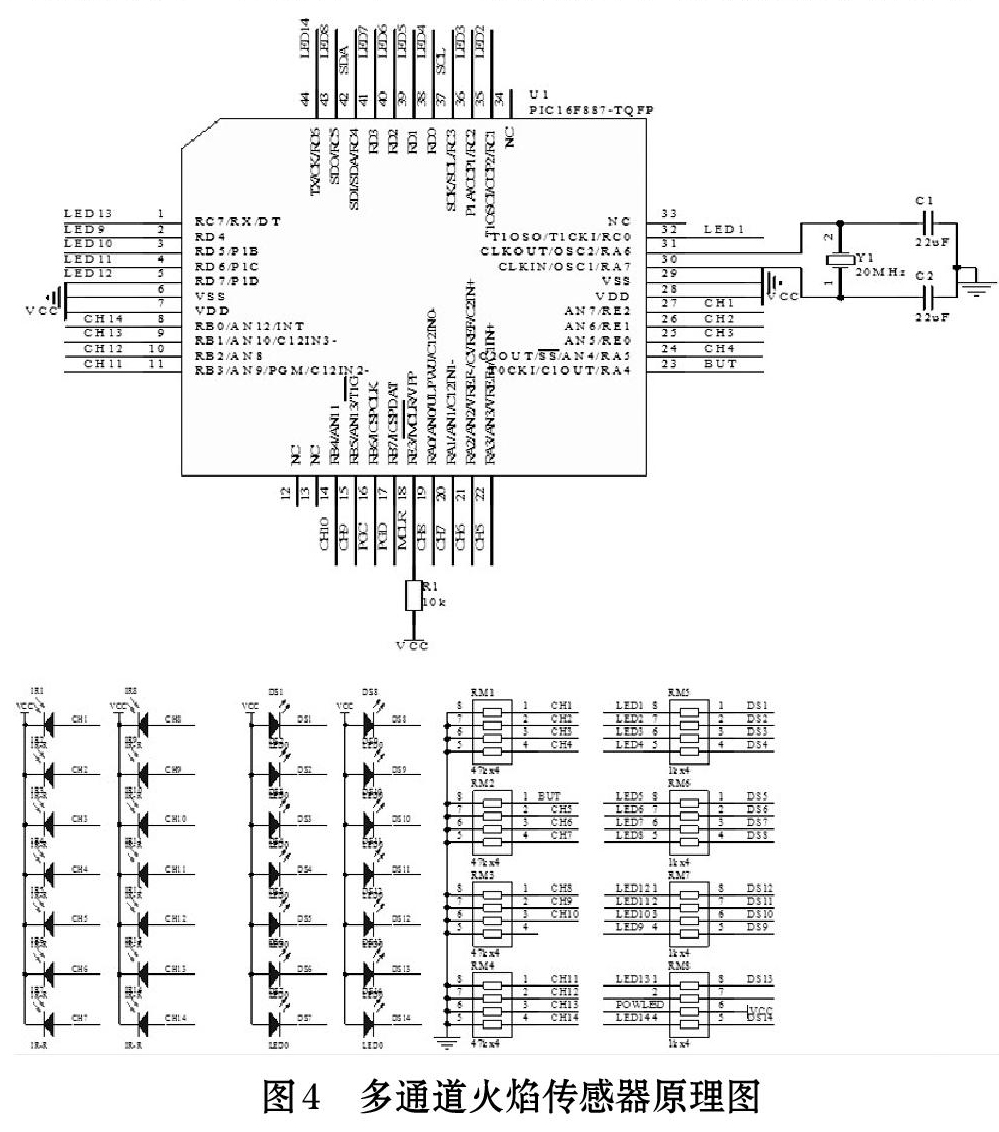
装配、使用方便等特点,额定工作电压为5V,可以广泛应用于机器人避障、流水线计件等众多场合。如图3所示,本红外避障传感器引出三条接口线,分别对应VCC、GND、OUT。它的输出状态是0、1。即遇到障碍物时为低电平,没有遇到障碍物时为高电平。3.2 火焰检测电路火焰传感器是机器人专门用来搜寻火源的传感器。为了对火焰实现准确定位,我们采用多通道火焰传感器,使用多个火焰传感器协同感知的办法,来判断火源相对于机器人的位置。在安装时考虑检测的角度,将传感器安放在与火焰同高的水平面上。这些火焰传感器分布在机器人的传感器板的正前,正左,正右。火源传感器能够探测到波长在700纳米-1000纳米范围内的红外光,其中红外光波长在880纳米附近时的灵敏度达到最大。在设计时首先设定一个阀值,开机默认阀值为100,可通过机器人单片机的程序来更改阀值,范围在20~200。机器人在行进过程中,如果测到的最大值小于阀值,则表示没有火焰,此时传感器采用折半查找的方法来寻找
<<上一页 下一页>>
广州市越秀区图书馆版权所有。
联系电话:020-87673002
本站访问人数: