基于ARM的灭火机器设计
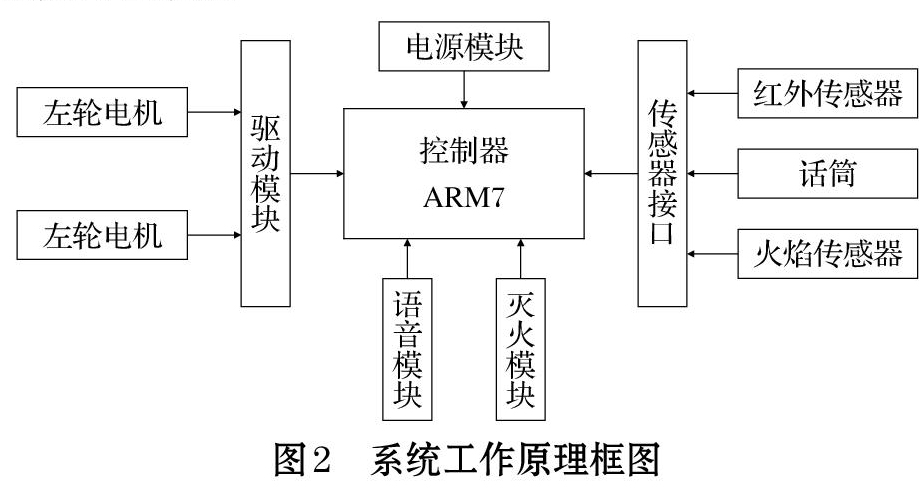
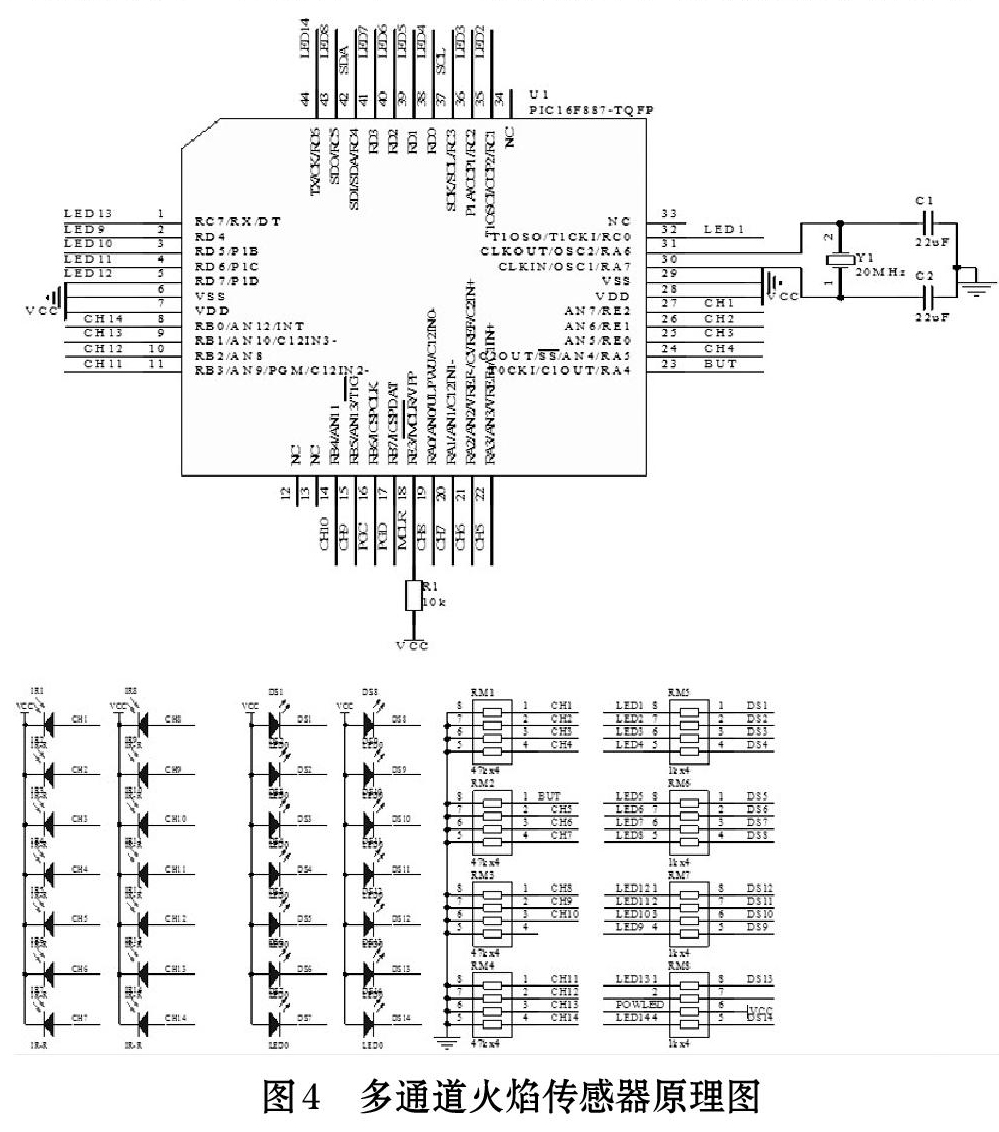
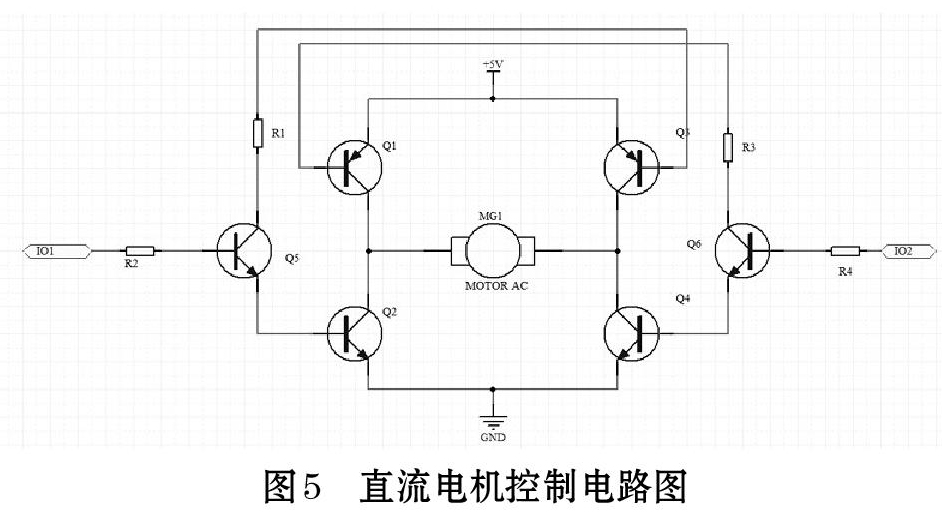
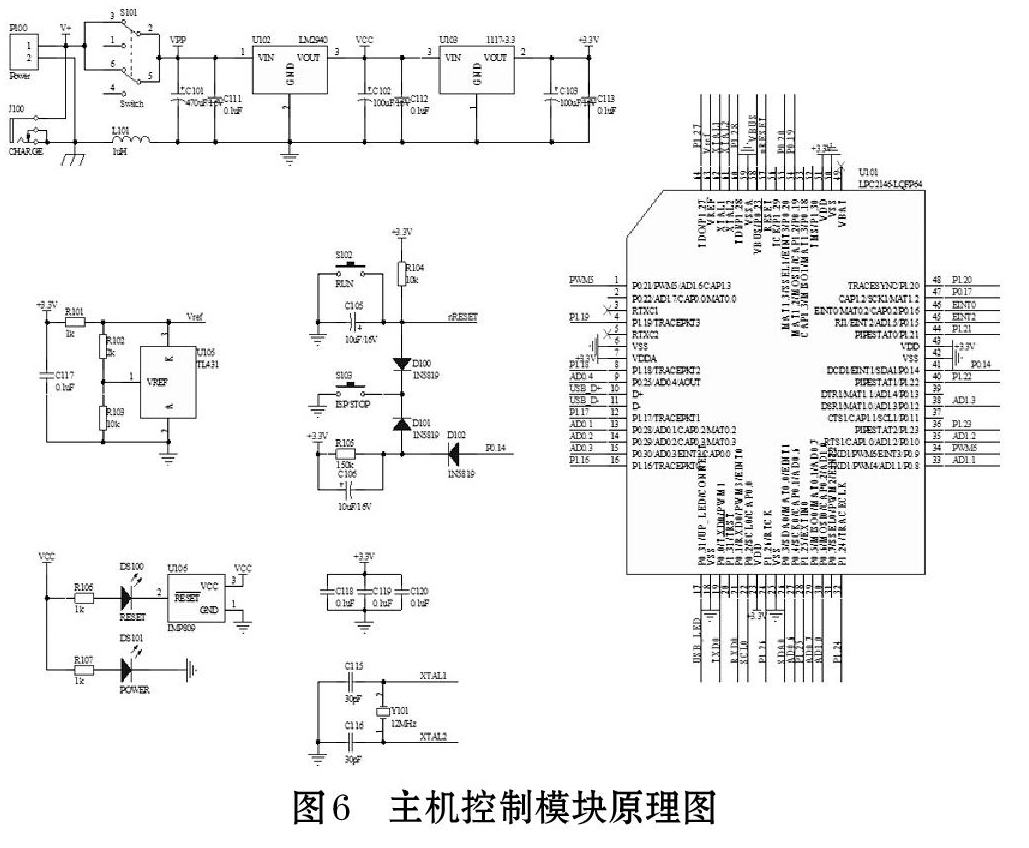
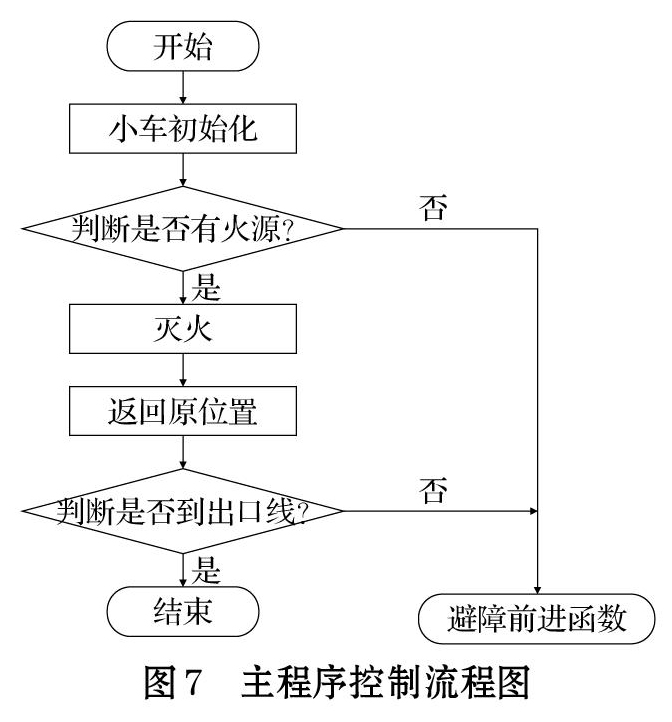
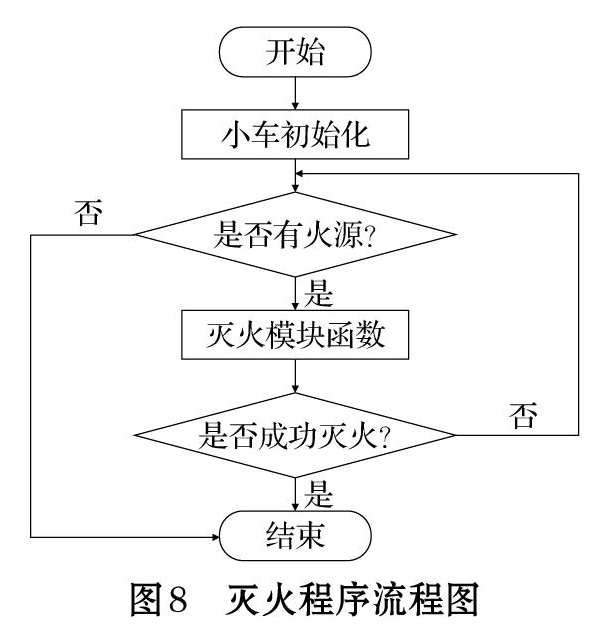
求而设计的,并参加了比赛,取得了良好的成绩。各部分的设计以及各传感器的使用都是经过多次比较和多次试验而确定的。机器人历时10s内完成灭火任务。设计中采用了嵌入式系统内核,大大提高了机器人处理信号的能力,采用了PWM信号控制大功率直流电机,在速度和精度方面有了很大的改进。多通道外火焰传感器,很好地完成了对火源的精确定位任务,提高了灭火可靠性和快速性。参考文献:[1] 刘极峰.机器人技术基础[M].高等教育出版社,2006.[2] 熊有伦,丁汉,刘恩沧.机器人学[M].机械工业出版社,1993.[3] 张英,机器人灭火的设计方案[J].西安邮电学院学报,2006.5:110-112[4] 广茂达能力风暴智能机器人开发系统AS-UⅡ使用手册,2008.[5] 梁毓明,徐立鸿.移动机器人多传感器测距系统研究与设计[J].计算机应用,2008.28(6):340-343[6] 曹小松,唐鸿儒,杨炯.移动机器人多传感器信息融合测距系统设计[J].自动化仪表,2009.5:4-8
<<上一页
广州市越秀区图书馆版权所有。
联系电话:020-87673002
本站访问人数: