基于ARM的灭火机器设计
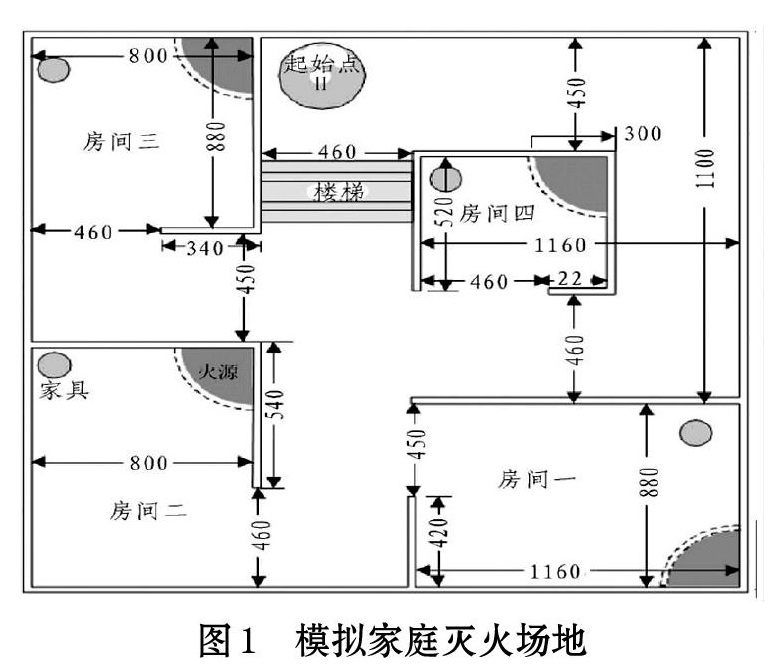
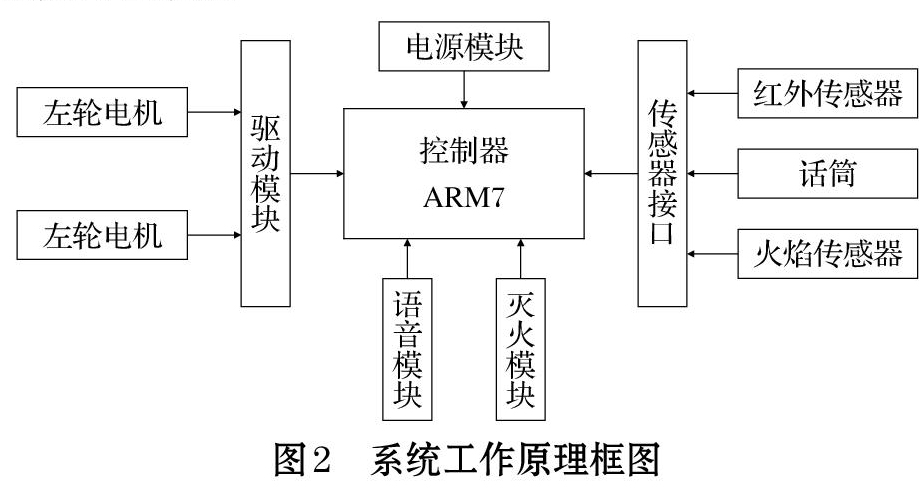
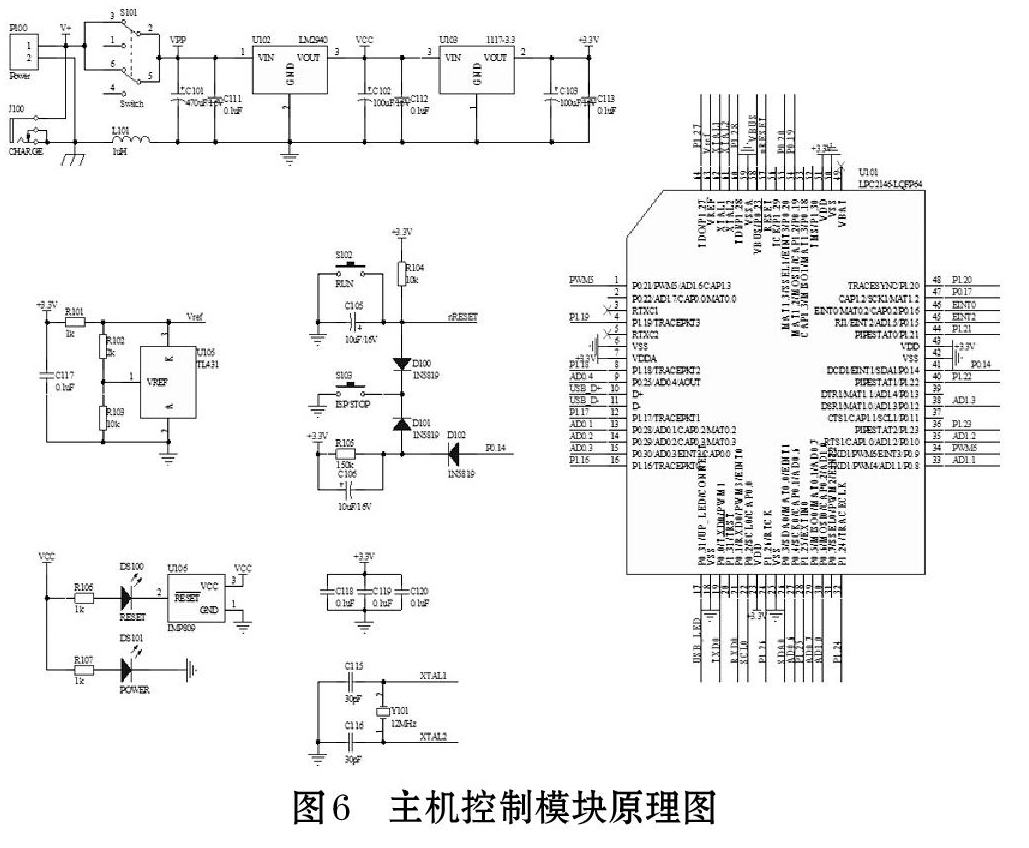
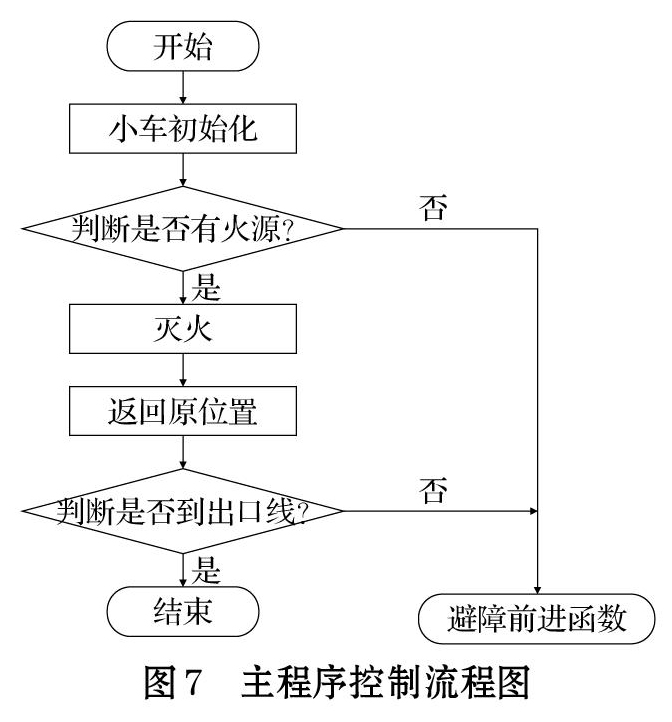
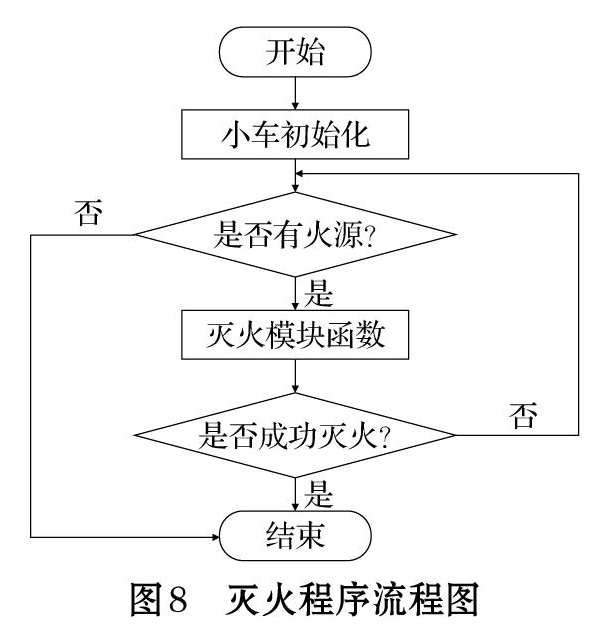
控制主板设计本灭火机器人的主机控制模块采用32位ARM内核的单片机,该控制器存储容量大、运行速度快、外围接口丰富、稳定可靠,支持C语言编程,方便编程。满足设计所需的AD转换、LCD液晶显示、电机控制、按钮控制等要求。该控制器采用3.3V供电,工作电流在20mA以下,可谓是低功耗节能的控制器。为了精确定位机器人的行走方位,在设计时还安装了指南针传感器,方便机器人方位的确定。主机控制模块原理图如图6所示。4 系统软件设4.1 家用灭火机器人系统总体流程此部分是小车运行的核心部分,控制小车所有运行状况。系统总体流程是:小车启动后,由入口进入场地,能够避开障碍物前进,一旦检测到有火源,就由单片机控制启动风扇,进行灭火。灭火完成后,返回原地。然后继续前进,重复刚才的过程,直到小车达到出口处才表示结束本次任务。在此过程中,各个模块彼此配合,完成各自的任务。主程序控制流程图如图7所示。4.2 小车灭火的主程序软件流程图如图8所示,首先对小车进行
<<上一页 下一页>>
广州市越秀区图书馆版权所有。
联系电话:020-87673002
本站访问人数: